Friction anchor control
We treat the Coulomb friction cone as a passive, virtually‑infinite‑bandwidth physical regulator. High-frequency disturbances (gusts, prop-wash, surface texture) are rejected by physics itself. The active controller only has to maintain a slow safety margin inside the cone.
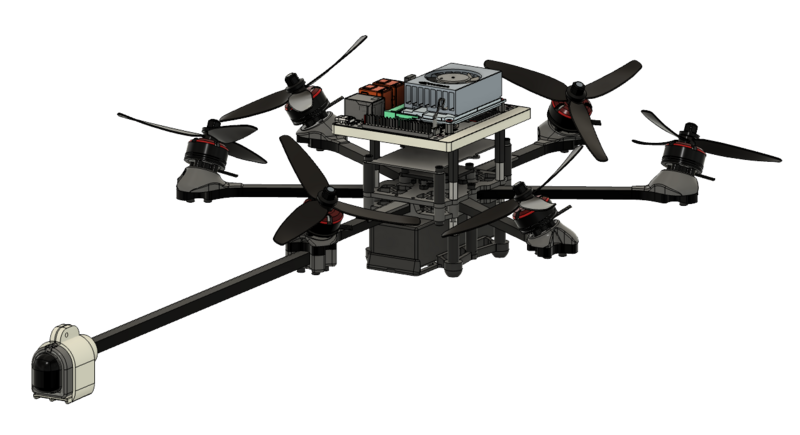
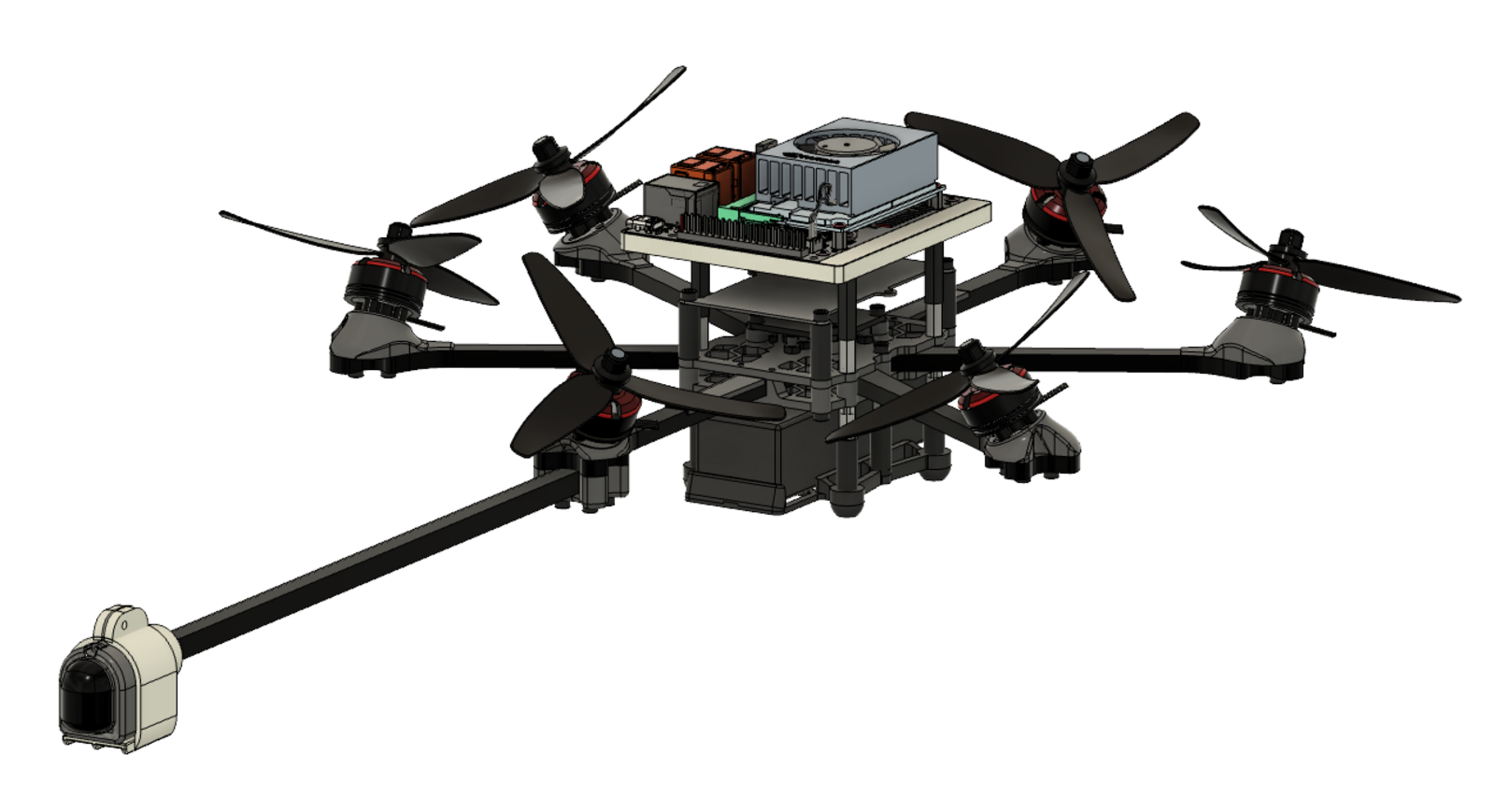
- Stable contact with simple fixed-pitch multirotors
- Robust against gusts and surface irregularities
- Lower energy cost: longer missions per battery
