Part I · Soft optical tactile sensing
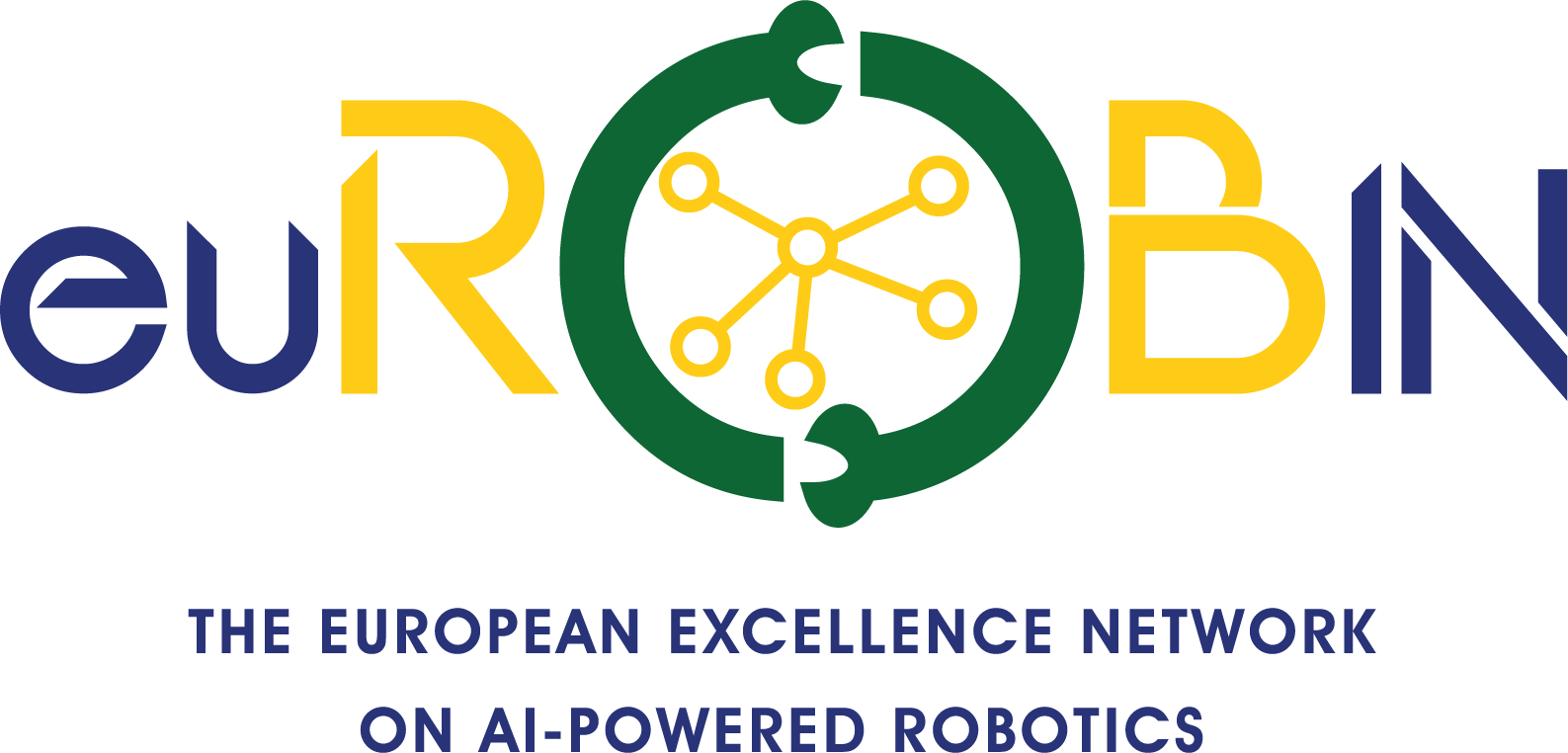
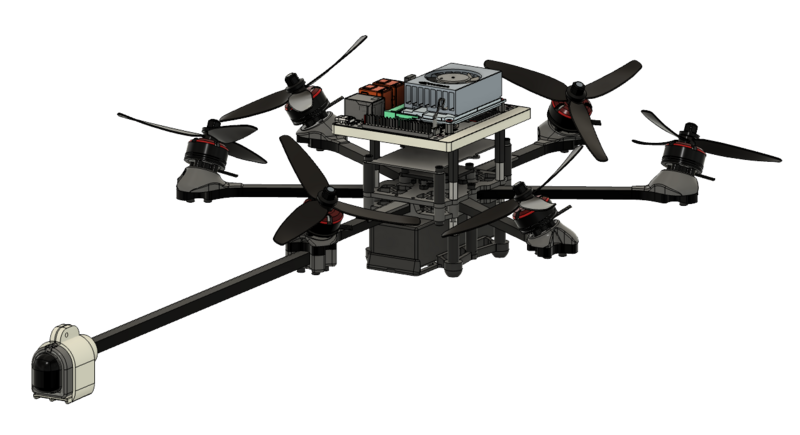
A complete tactile sensing pipeline that turns a silicone-membrane camera sensor into a quantitative contact-state observer. A purpose-built characterization rig on a UR10 manipulator at Sapienza DIAG produced the ground-truth dataset for a heteroscedastic deep regressor — itself trained against a physics-informed loss that anchors lateral force estimates to torque consistency. An Extended Kalman Filter fuses the regressor's per-sample uncertainty with the carrier's pose to produce stable estimates of contact patch geometry and contact force. The full pipeline was first validated in closed-loop force–motion control on the UR10, then deployed in flight on the UTwente miniThex hexarotor with both flat and tilted sensor-mount configurations.